Soft actuators made of liquid crystal polymer networks (LCN) can change shape or move in response to external stimuli. Generally, an LCN actuator is prepared by first aligning the mesogens in a certain way and then fixing the LC alignment through polymer chain crosslinking. However, once fabricated, these actuators cannot be reprocessed to behave differently due to permanent chemical crosslinking of polymer chains. This achievement is the first of its type.
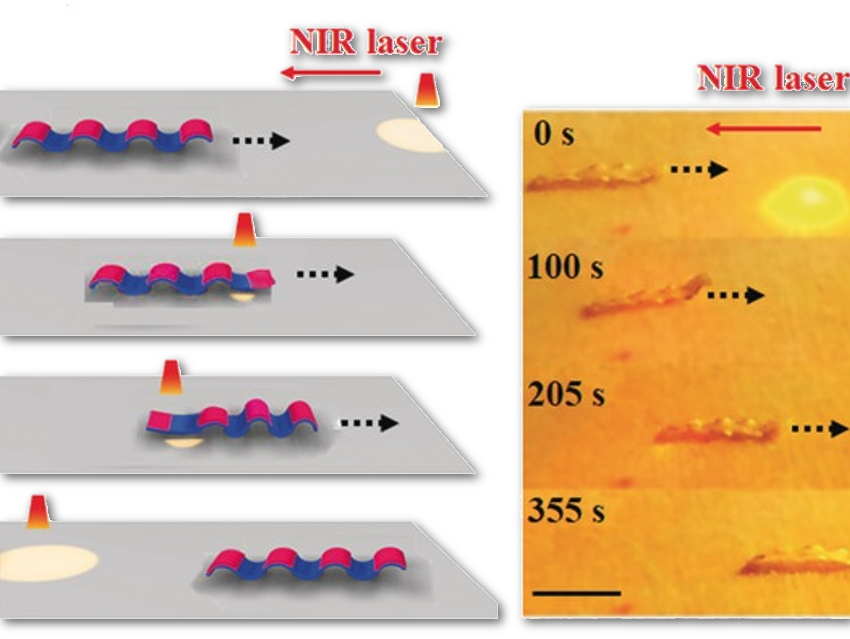
Yue Zhao and co-workers, University of Sherbrooke, Canada, have developed an approach to change the shape transformation and the locomotion behavior of an LCN actuator. They have developed an LCN actuator containing anthracene moieties that can undergo reversible dimerization (for crosslinking) and cleavage (for de-crosslinking) upon absorption of ultraviolet light at two different wavelengths. By stepwise de-crosslinking in selected areas, an existing crosslinked actuator can transform between a planar sheet and various complex 3D origami structures upon heating and cooling. Even a light-fueled microwalker (pictured) can be made to change its locomotion behavior by repatterning the de-crosslinked areas in the actuator.
The strategy shows how a single LCN actuator can be customized for various tasks and suggests the possibility of remote in situ reconfiguration. “Imagine a walking soft robot in difficulty on a rough surface that, when light is applied, can reconfigure and change its motion mode to adapt to the new environment.”, the researchers add.
- Selective Decrosslinking in Liquid Crystal Polymer Actuators for Optical Reconfiguration of Origami and Light-Fueled Locomotion,
Zhi-Chao Jiang, Yao-Yu Xiao, Xia Tong, Yue Zhao,
Angew. Chem. Int. Ed. 2019.
https://doi.org/10.1002/anie.201900470